舵机(ji)带(dai)宽测(ce)试(shi)系统设计与试验方法(fa)研(yan)究
舵(duo)机(ji)作为(wei)无(wu)人机(ji)系统中的重要(yao)执行(xing)机(ji)构,是(shi)一(yi)个(ge)高精 度(du)的(de)位置伺服(fu)系(xi)统�����,其(qi)工(gong)作(zuo)原(yuan)理(li)是(shi)接收(shou)无人(ren)机(ji)自(zi)驾(jia)仪(yi)给(gei)出 的(de)控(kong)制指令驱动(dong)无(wu)人(ren)机(ji)舵(duo)面(mian)偏转(zhuan),改变(bian)无人机(ji)飞行(xing)姿(zi)态或(huo)飞(fei)行轨(gui)迹����,以达(da)到(dao)精(jing)确(que)控制无(wu)人(ren)机(ji)飞行(xing)和(he)完成规划航线任务的(de)目的�。舵机(ji)对(dui)输(shu)入(ru)指令的(de)跟(gen)踪能(neng)力直(zhi)接影(ying)响(xiang)着(zhe)无人(ren)机(ji)的飞行(xing)控(kong)制性(xing)能���,由于舵(duo)机(ji)本(ben)身(shen)的(de)复(fu)杂(za)性����、元件参数(shu)测(ce)量(liang)的困难(nan)性(xing)以及(ji)元件(jian)参数(shu)测量(liang)的不准确性����,并受环境变(bian)化、元器件 老(lao)化(hua)等(deng)因素(su)影(ying)响�����,检测舵机(ji)带宽(kuan)指标对于(yu)保(bao)证控(kong)制系统设计(ji)的有效性(xing),提高(gao)无人(ren)机飞行(xing)时的动态品质(zhi)与制导(dao)、控制(zhi)性 能指标尤(you)为重要(yao)�����。传统舵机(ji)带(dai)宽测(ce)试采(cai)用的(de)设(she)备(bei)仪器是(shi)频谱(pu)分(fen)析仪�,测(ce)试(shi)设(she)备费(fei)用昂贵(gui)���,采(cai)用手工(gong)记(ji)录测(ce)试结(jie)果自(zi)动(dong)化程(cheng)度(du)较低(di)�����, 测试(shi)过(guo)程(cheng)费时费力(li)为解决(jue)这(zhe)些问(wen)题(ti)�,国内(nei)研制了(le)基于(yu) 虚拟(ni)仪器(qi)的(de)舵(duo)机(ji)测(ce)试系(xi)统�,实现了(le)对舵机频率特(te) 更好的(de)直(zhi)观性和易操(cao)纵性(xing)�,但(dan)是(shi)该舵(duo)机测试(shi)系(xi)统的(de)研究(jiu)对(dui)象主要(yao)是(shi)针(zhen)对大型的模拟舵(duo)机,由(you)于模(mo)拟舵机控制(zhi)指令为(wei)电(dian)压信号(hao),而(er)数(shu)字舵(duo)机(ji)控制(zhi)指令信(xin)号(hao)为 PWM信(xin)号(hao)�����,并(bing)且(qie)舵机负(fu)载扭(niu)矩加载系(xi)统(tong)量程较(jiao)大(da)�����,因此(ci)该(gai)测(ce)试(shi)系统并不(bu)适(shi)用于(yu) 小(xiao)型(xing)数(shu)字舵(duo)机(ji)带(dai)宽测试(shi)。并且(qie),作为(wei)舵(duo)机性能指(zhi)标(biao)测试(shi)的(de)专用(yong)设备(bei)�,该(gai)测试系(xi)统方(fang)案(an)未(wei)充(chong)分利(li)用无人(ren)机系统自身(shen)现有(you)设(she)备���,而是(shi)重新构建了一套(tao)软/硬件系(xi)统(tong)����,需要(yao)采(cai)购(gou)硬件 设备(bei)�����,并(bing)基(ji)于其(qi)软(ruan)件(jian)平(ping)台开发软(ruan)件系(xi)统(tong),研(yan)制(zhi)周期(qi)较(jiao)长����,费(fei) 用高(gao),并(bing)且(qie)功(gong)能单一�。FUTABA�����、JR和(he) HITEC等(deng)公(gong)司的常(chang)用舵(duo)机(ji)产品已(yi)广 泛应用于(yu)小(xiao)型无(wu)人(ren)机(ji)系(xi)统设计(ji)中(zhong)���,但(dan)产(chan)品说明书提(ti)供的参 数(shu)列(lie)表(biao)只包括(kuo)尺(chi)寸�、重量(liang)、最(zui)大偏(pian)转速(su)度和最大扭(niu)矩,不(bu)提供带(dai)宽(kuan)技术(shu)指(zhi)标(biao)�。针(zhen)对(dui)该(gai)现(xian)状(zhuang)和无人(ren)机(ji)控制律(lv)设(she)计(ji)的实际需求(qiu)���,本文首(shou)先(xian)介绍(shao)了(le)数(shu)字(zi)舵(duo)机(ji)带宽(kuan)测试(shi)原理和试(shi)验方法, 并(bing)以无人(ren)机自(zi)身设(she)备为基础集(ji)成(cheng)构建(jian)了(le)小(xiao)型数(shu)字舵机带宽(kuan)测试方案(an),完(wan)成(cheng)软硬(ying)件系统设计与开(kai)发����,通(tong)过(guo)该(gai)测(ce)试(shi)系统(tong)对(dui)某型(xing)舵(duo)机带(dai)宽(kuan)指标(biao)进(jin)行实际(ji)测试(shi)和(he)分(fen)析(xi),获得(de)了(le)最符(fu)合(he)实(shi) 测(ce)结(jie)果(guo)的舵机标(biao)准近似二(er)阶(jie)数(shu)学(xue)模(mo)型(xing)和(he)性能指(zhi)标从(cong)而为(wei) 无(wu)人(ren)机(ji)舵机(ji)选(xuan)型(xing)和(he)设计(ji)人员进(jin)行(xing)制导控制(zhi)系(xi)统(tong)新一(yi)轮(lun)迭(die)代(dai)设(she)计提供了(le)技(ji)术支持���。
1. 舵机带(dai)宽测(ce)试(shi)方(fang)案(an)
1.1带宽指(zhi)标(biao)
控(kong)制数(shu)字舵(duo)机(ji)进行(xing)1度幅(fu)值(zhi)的(de)正弦(xian)偏(pian)转运(yun)动(dong)时,幅(fu)值 -3dB处(chu)的频(pin)率(lv)值称为舵(duo)机带(dai)宽指(zhi)标����。舵(duo)机(ji)带宽(kuan)指标(biao)是由无人(ren)机(ji)本(ben)体自然(ran)频率(lv)确定,对(dui)于静(jing)稳定无(wu)人(ren)机一(yi)般可取(qu) 5~10倍(bei)[13-15]。对(dui)于(yu)静不(bu)稳定无(wu)人(ren)机系(xi)统(tong),由(you)于(yu)主要(yao)依靠飞(fei)行(xing)控制(zhi)系(xi)统保(bao)证无人(ren)机(ji)满足(zu)飞行品质(zhi)要(yao)求(qiu)��,因(yin)此对舵(duo)系统(tong)动态指标(biao)要(yao)求更高。
1.2测(ce)试及(ji)数据处(chu)理方(fang)法
本文(wen)采用(yong)频域响(xiang)应法测(ce)量(liang)舵机带(dai)宽(kuan)����,选(xuan)取频(pin)率测(ce)试(shi)点(dian)序列,依(yi)次在(zai)每(mei)个频率点上输(shu)入等幅(fu)正(zheng)弦(xian)信(xin)号(hao)x(t)= sinωt作(zuo)为(wei)舵机激(ji) 励(li)信(xin)号���,并(bing)对输(shu)出(chu)信号(hao)进(jin)行取(qu)样,根(gen)据(ju) 线性系(xi)统(tong)理(li)论,理(li)想情(qing)况(kuang)下(xia)系(xi)统(tong)稳态响(xiang)应为 y0(t)= Bsin(ωt+φ)��,实(shi)际(ji)工(gong)程(cheng)测试中(zhong)有(you)谐波和噪(zao)声干(gan)扰信号 N(t)��,即(ji)y0(t)=Bsin(ωt+φ)+N(t)��。采用(yong)相(xiang)关(guan)测量(liang)法(fa)对(dui)试(shi)验(yan)原始数据(ju)进行处理(li)。为方便(bian)计 算,暂不(bu) 考(kao)虑噪(zao)声(sheng)影响,假设N(t)=0。分(fen)别用(yong)sinωt��,cosωt与(yu)y(t)进(jin)行互(hu)相关(guan)运(yun)算�����,有(you):
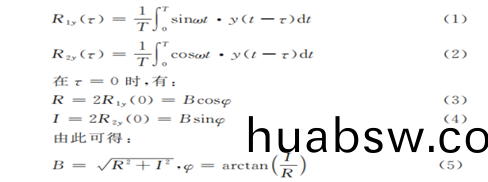
N(t)≠0时(shi)��,由(you)于三角函(han)数的(de)正(zheng)交(jiao)性(xing)与噪(zao)声(sheng)的(de)独 立性,相关测量(liang)法相(xiang)当(dang)于以当前激(ji)励频(pin)率(lv) ω为(wei)中(zhong)心频率(lv)的(de) 带(dai)通滤波器(qi),随(sui)着(zhe)积分时(shi)间(jian) T 的增加�,输(shu)出(chu)信(xin)号中的谐(xie)波和干扰信号将被滤(lv)除(chu)�����。实验中(zhong)采集(ji)数(shu)据为(wei)离散点序列,假 设采样率为(wei)s�����,积(ji)分时(shi)间(jian)为(wei)T,则采(cai)样点数 N 为T·s�,相(xiang)应的离散计(ji)算(suan)公(gong)式(shi)为(wei):
y(k)为(wei)信号在第(di)k 个(ge)采样(yang)点(dian)的值��,由上式可(ke)求(qiu)得系(xi)统幅值增益Am 和相位φ为:

对(dui)每个实(shi)验(yan)点(dian)都按照上式进行求(qiu)取(qu)。当获(huo)得(de)了(le)所(suo)有实(shi)验(yan)点的(de)频(pin)率(lv)���、输(shu)入(ru)和(he)输出(chu)信(xin)号的幅(fu)值(zhi)及(ji)二者(zhe)的相位差(cha)后����,即可绘制(zhi)处舵(duo)机(ji)系(xi)统的(de)波特(te)图(tu)或幅频(pin)特(te)性(xing)图(tu)�。
2.舵机(ji)带(dai)宽测(ce)试(shi)系(xi)统设计(ji)
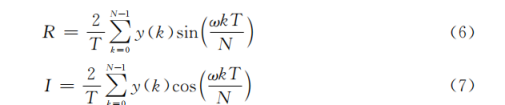
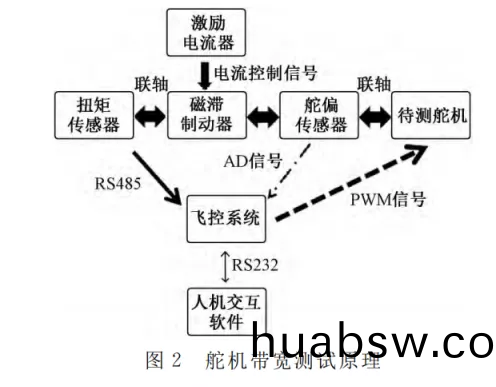
下(xia)面(mian)介(jie)绍(shao)以(yi)无(wu)人(ren)机自(zi)身设备为(wei)基础(chu)集(ji)成构(gou)建(jian)的(de)小型数(shu)字舵(duo)机带宽测试(shi)方案(an),如图(tu)1所(suo)示�����,整(zheng)个舵(duo)机带宽测(ce)试(shi)系统(tong)由硬(ying)件(jian)系(xi)统(tong)和软件(jian)系(xi)统组成,硬件(jian)系(xi)统包括舵机测试台架、无人机 飞控系(xi)统(tong)�、待测(ce)舵机(ji)、舵偏(pian)角(jiao)传感器、磁滞制(zhi)动器�、扭(niu)矩(ju)传感器 和(he)工控(kong)机(ji)等����。软(ruan)件(jian)系统包(bao)括(kuo)舵机带(dai)宽(kuan)测试软(ruan)件、人(ren)机(ji)交互(hu)软 件(jian)和(he)数(shu)据记录(lu)软(ruan)件(jian),在(zai)无(wu)人机自身(shen)软系(xi)统(tong)基础(chu)上集成(cheng)开(kai)发���。
带(dai)宽测试(shi)原理(li)如图2所示,扭矩传(chuan)感器(qi)、磁(ci)滞制动器、 舵偏(pian)角传感器(qi)以及(ji)待测(ce)舵机(ji)通(tong)过联轴(zhou)器(qi)连接(jie),以(yi)减小间(jian)隙�����, 并固定(ding)于(yu)舵(duo)机测试(shi)台架上(shang)�。磁滞制动(dong)器是一种优越的扭(niu)矩控制设(she)备(bei),利(li)用磁制(zhi)原(yuan)理通(tong)过(guo)控制(zhi)输(shu)入(ru)的励磁电流(liu)产生(sheng)连(lian)续可(ke)调(diao)的负载(zai)扭矩(ju)��,且(qie)控制电(dian)流和(he)输出扭矩(ju)具有较好的线性(xing)关(guan)系,实现(xian)舵(duo)机任意(yi)载(zai)荷(he)谱的自动加载(zai);扭矩传感器(qi)用(yong)于(yu)测定舵(duo)机实(shi)际受(shou)到(dao)的扭矩;飞(fei)控系(xi)统(tong)是(shi)整(zheng)个测试系统(tong)的核(he) 心(xin),主要功(gong)能为(wei):1)响(xiang)应(ying)人(ren)机(ji)交互软件(jian)对(dui)舵(duo)机(ji)激励信(xin)号(hao)的(de)配(pei)置,包(bao)括激励(li)信(xin)号(hao)幅值(zhi)、频率及执行(xing)时(shi)间等(deng);2)输(shu)出(chu)不(bu)同频(pin) 率的(de)正弦(xian)激励(li) PWM 信(xin)号驱(qu)动待(dai)测(ce)舵(duo)机�����;3)通过舵偏(pian)角传感(gan)器(qi)实(shi)时采集舵机输出响(xiang)应����;4)记(ji)录(lu)保(bao)存(cun)各试验(yan)点数据(ju),包(bao) 括(kuo)时(shi)间、扭矩(ju)��、输入指(zhi)令以(yi)及(ji)输(shu)出(chu)响应数(shu)据等(deng)。
测(ce)试步骤及(ji)注意事(shi)项(xiang)
3.以(yi)某型 FUTABA 常(chang)用(yong)数(shu)字舵机为测试(shi)案例(li),简(jian)要(yao)阐(chan) 述试(shi)验(yan)过(guo)程(cheng)中(zhong)的测试(shi)步骤(zhou)及(ji)注意(yi)事(shi)项(xiang)。
试验(yan)步骤如下(xia):
1)估(gu)算待(dai)测(ce)舵(duo)机(ji)频(pin)带��,确(que)定激励(li)用的(de)正弦(xian)信号(hao)幅(fu)值范(fan) 围(wei)和频(pin)率(lv)范围(wei),将频率范围等(deng)分(fen)��,并(bing)绘制(zhi)试(shi)验表(biao)格,表格中(zhong) 填(tian)好各(ge)试验(yan)点(dian)的(de)幅值和(he)频率值���;
2)检(jian)查确(que)认(ren)各(ge)测试(shi)系(xi)统(tong)设(she)备连(lian)接(jie)正常(chang)后上电(dian);
3)标定待(dai)测(ce)舵(duo)机(ji)输(shu)入(ru)激(ji)励(li) PWM 指令(ling)和(he)舵(duo)偏(pian)角(jiao)采(cai)集(ji)输出电(dian)压信号(hao)与实(shi)际偏转角(jiao)度对应(ying)表��;
4)设置(zhi)各试(shi)验(yan)点处待(dai)测舵(duo)机(ji)激励(li)输入信(xin)号幅(fu)值(zhi)��、频率和(he)执行(xing)时间;
5)启(qi)动(dong)舵(duo)机,记录(lu)并(bing)保存(cun)本(ben)次(ci)试(shi)验点响(xiang)应(ying)数(shu)据(ju)���;
6)重(zhong)复(fu)步(bu)骤(zhou)4)~5)�����,直(zhi)至(zhi)所(suo)有试验(yan)点测试完毕(bi)����;
7)调节磁滞制动器控(kong)制励磁(ci)电(dian)流(liu)输入(ru),给待(dai)测(ce)舵机(ji)加 载指定的(de)铰(jiao)链(lian)力矩(ju),重复(fu)步骤(zhou)4)~6)�,完成(cheng)不同(tong)负(fu)载情况下所(suo)有(you)试(shi)验点测(ce)试�;
8)整理和分(fen)析(xi)试(shi)验数据(ju)。整(zheng)个(ge)测试过程中(zhong)需要(yao)注意事(shi)项(xiang)包括(kuo):1)测试(shi)数(shu)据(ju)应在 激励(li)正弦信(xin)号(hao)的第(di)5个周(zhou)期(qi)后(hou)采(cai)集记(ji)录(lu)����,以(yi)避免系(xi)统尚未(wei)稳(wen)定影响测量(liang)精度(du);2)随着频(pin)率的增(zeng)大(da),防(fang)止因(yin)衰减过(guo)大(da)导 致输出信(xin)号不(bu)明(ming)显,激(ji)励(li)正弦(xian)信(xin)号(hao)的幅(fu)值(zhi)也(ye)应逐渐递(di)增,但须(xu)保证最大偏转角速(su)度(du)不(bu)要(yao)超(chao)过(guo)舵机(ji)指(zhi)标要(yao)求;3)整个(ge)测(ce) 试过程(cheng)中机进(jin)行(xing)频(pin)繁(fan)的换(huan)向(xiang)操作���,其温升较快(kuai),为避(bi)免(mian) 温升(sheng)对(dui)测(ce)量(liang)结果(guo)的影(ying)响,在每个(ge)频(pin)率点测试(shi)完之(zhi)后延(yan)迟一(yi) 段时(shi)间(jian)再(zai)进(jin)行(xing)下一(yi)点(dian)的(de)测(ce)试(shi)。
4.试(shi)验(yan)结果与(yu)数据(ju)分析
4.1数(shu)据(ju)处(chu)理(li)
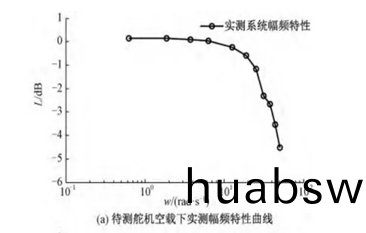
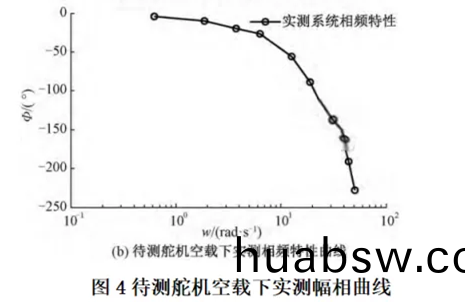
图(tu)3所(suo)示为空(kong)载情况下0.1Hz频率测试(shi)点原(yuan)始试(shi)验(yan)曲(qu)线(xian)���,按提(ti)供(gong)的(de)数据处理(li)方法(fa)得到(dao)舵(duo)偏(pian)角传感器(qi)输出(chu)测量信号(hao) 与舵(duo)机输入控(kong)制指(zhi)令的幅值(zhi)比为1.0���,相(xiang)位差为-3.5°���。汇总各(ge)频率(lv)测试点序(xu)列(lie)的(de)幅频特性和(he)相(xiang)频(pin)特(te)性(xing)实(shi)验(yan)结果(guo)���,如(ru)图(tu)4所(suo)示,根据(ju)图4实测舵机的幅值(zhi)和相位差与(yu)频(pin)率(lv)
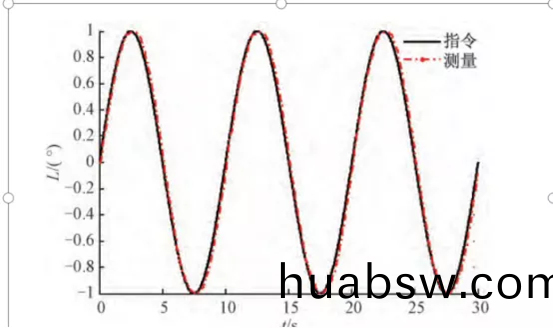
待测(ce)舵(duo)机(ji)空(kong)载(zai)下(xia)0�。1Hz频率(lv)响(xiang)应试验曲线(xian) 的曲线结果(guo)可知�,结合幅频特性和相频(pin)特性(xing)定义���,可以得(de)到(dao) 幅值(zhi)下降(jiang)-3dB时待(dai)测(ce)舵机的(de)频(pin)率(lv)为(wei)39.14rad/s����,即(ji)舵机(ji) 带宽 ωH 为 6.23 Hz���,而(er)相位差(cha)相差(cha) -90°时(shi) 的(de) 频 率 为 21.55rad/s����,即(ji)舵(duo)机的相(xiang)频特性(xing)(固有(you)频率(lv))ωn 为(wei)3.43Hz。
4.2 误(wu)差分(fen)析
不考虑(lv)舵(duo)机的(de)死(si)区和(he)非线性,一般可(ke)以(yi)采用(yong)标(biao)准的(de)二(er)阶(jie)模(mo)型(xing)来模(mo)拟舵(duo)机真实响应特(te)性:

按(an)照(zhao)上(shang)述(shu)标准二阶模(mo)型(xing),可以(yi)计算舵(duo)机(ji)带宽(kuan)ωH 与(yu)固(gu)有频率(lv)关系(xi)理(li)论上为(wei):

因(yin)此,当获得(de)二(er)阶等(deng)效(xiao)模型的(de)固(gu)有频(pin)率(lv)ωn 和阻(zu)尼比(bi)ξ 后(hou),其幅(fu)频特性(xing)、相频特(te)性(xing)及带(dai)宽(kuan)就(jiu)确定(ding)了(le)。
对于(yu)二(er)阶等效(xiao)模型(xing)�����,阻尼(ni)比ξ 一(yi)般介(jie)于(yu)0到(dao)1�,根(gen) 据(ju) 式(shi)(11)����,舵(duo)机的(de)带(dai)宽理(li)论上介与固(gu)有(you)频(pin)的0至倍(bei)之(zhi)间,然而(er)4.1节(jie)根(gen)据(ju)原始试(shi)验(yan)数据(ju)测(ce)得舵机幅频特性(xing)(带(dai) 宽)与相频(pin)特(te)(固(gu)有频率)比 值 等 于1.82����,不属(shu)于(yu)上述理论(lun)范围,经分(fen)析(xi)研(yan)究(jiu)认(ren)为:真实测(ce)量系(xi)统存在时(shi)间(jian)延迟(chi)�����,这对系统(tong)的(de)幅频(pin)特性影(ying)响较小�����,因(yin)此(ci)幅频(pin)特(te)性(xing)结(jie)过不(bu)需(xu)要修(xiu)正,但系统延(yan)时对舵机(ji)相(xiang)位(wei)滞后(hou)的影响很大,导(dao)致测得(de)的(de)相(xiang)位(wei)误(wu)差较(jiao)大�,因(yin)此(ci)需(xu)要(yao)对相(xiang)位差进(jin)行(xing)修(xiu)正(zheng)和(he)补(bu)偿。
4.3延(yan)时(shi)修(xiu)正和试验(yan)结果
为(wei)得到舵机实测(ce)的(de)近似(shi)标(biao)准(zhun)二(er)阶(jie)模(mo)型(xing),需(xu)要修(xiu)正系(xi)统(tong)相(xiang)位(wei)差��,具体(ti)步骤如(ru)下:
1)假(jia)设(she)延(yan)迟(chi)时(shi)间(jian),修正(zheng)各(ge)测(ce)试(shi)频(pin)率下测试相(xiang)位差;
2)由(you)测试(shi)频(pin)率与(yu)修(xiu)正后(hou)的(de)相(xiang)位(wei)差插值(zhi)得(de)到系(xi)统(tong)相频(pin)特性(固(gu)有(you)频率);
3)计算(suan)得到(dao)系统阻尼(ni)比,确定系(xi)统(tong)二(er)阶模型(xing)�;
4)计(ji)算(suan)不同频率(lv)下系(xi)统二(er)阶(jie)模(mo)型幅频特性(xing)和相(xiang)频特(te)性����;
5)分(fen)别(bie)计(ji)算实(shi)测结(jie)果(guo)与(yu)对应频率下(xia)二(er)阶(jie)模型对(dui)应频率下的幅频(pin)特性与(yu)相频特(te)性(xing)差值的(de)平方和;
6)改变(bian)延(yan)迟(chi)时(shi)间(jian)�,寻求差值(zhi)平(ping)方(fang)和(he)最小(xiao)时对应的(de)延(yan)迟时间;
7)绘制实(shi)测结果(guo)与二阶模(mo)型bode图验(yan)证计算(suan)结(jie)果(guo)�����。
按照(zhao)上述(shu)修(xiu)正(zheng)方案,通 过 MATLAB 寻优算(suan)法得到系 统(tong)延(yan)迟时间为46ms,
舵(duo)机(ji)标准(zhun)二阶(jie)模(mo)型固(gu)有(you)频率ωn 为 48.63rad/s,阻(zu)尼比ξ为0.85时,其(qi)幅频和(he)相(xiang)频特性(xing)曲(qu)线与实(shi)测(ce)系(xi)统差值(zhi)平(ping)方和(he)最(zui)小(xiao)���,两(liang)者(zhe)对比曲线如(ru)图5所(suo)示,从(cong) 图(tu)5中(zhong)可(ke)以看出(chu)二者(zhe)曲(qu)线(xian)基(ji)本吻(wen)合(he)����,表明(ming)上述修(xiu)正方案(an)的(de)正(zheng)确性(xing)与(yu)可(ke)行(xing)性(xing)。

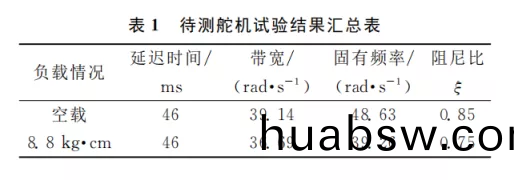
按照(zhao)上(shang)述系统延迟修(xiu)正(zheng)方(fang)法(fa)对所(suo)有(you)原(yuan)始(shi)试(shi)验数(shu)据(ju)进行了处(chu)理(li)分析(xi),汇(hui)总(zong)得到该(gai)型(xing)舵(duo)机最(zui)终试验结(jie)果如(ru)表(biao)1所示(shi),根(gen)据(ju)表(biao)1结果(guo)可知(zhi)���,在(zai)有(you)负(fu)载情况(kuang)下待(dai)测舵(duo)机带(dai)宽和阻尼比技(ji)术指标略有下(xia)降��。
5.结论
本(ben)文(wen)针对(dui)常用(yong)数字(zi)舵(duo)机产品(pin)未(wei)提(ti)供(gong)舵机(ji)带宽技(ji)术指标(biao)的(de)现(xian)状和(he)无(wu)人(ren)机(ji)控(kong)制律(lv)设计的实际需求(qiu),兼(jian)顾技术(shu)先(xian)进性(xing)和工程实用(yong)性,基(ji)于(yu)无(wu)人(ren)机自(zi)身(shen)软硬(ying)件设(she)备构建(jian)了小型(xing)数(shu)字(zi)舵机(ji)带宽(kuan)测(ce)试系统(tong),完(wan)成(cheng)了测试(shi)系(xi)统的(de)软(ruan)硬件架构(gou)设计(ji)与(yu)集成��,利用(yong)该测试系统对小(xiao)型无人(ren)机(ji)常(chang)用数(shu)字(zi)舵机空载(zai) 和带(dai)载情(qing)况(kuang)下(xia)的(de)带宽指标(biao)进(jin)行了检(jian)测(ce),考虑到实(shi)际(ji)测量(liang)系(xi)统存(cun)在(zai)时间延迟��,修正并(bing)寻求(qiu)了(le)最(zui)符(fu)合(he)实测结果(guo)的(de)近(jin)似标(biao) 准二(er)阶(jie)数学模型(xing)���,建(jian)立了(le)常用(yong)舵(duo)机实(shi)际(ji)性能(neng)数(shu)据库(ku)����,为(wei)后续无(wu)人(ren)机研(yan)制和(he)控制(zhi)律优(you)化设计提(ti)供(gong)了技术(shu)支(zhi)持��。实际工程(cheng) 应用(yong)表(biao)明(ming)以(yi)无(wu)人(ren)机自(zi)身软(ruan)/硬件系统为基(ji)础(chu)构建的(de)舵机带(dai)宽测(ce)试系(xi)统(tong)方案(an)可(ke)行,功能完(wan)备����,可(ke)靠性好,成(cheng)本(ben)低(di)��,为(wei)小型数字舵(duo)机(ji)带(dai)宽指(zhi)标检测(ce)提供一种新(xin)手(shou)段。
参考(kao)文(wen)献(xian):[1] 张西(xi)涛(tao)����,江飞(fei)鸿,赵海(hai).飞(fei)控(kong)系(xi)统(tong)极限环(huan)抑制对舵(duo)机性 能的需求计算[J].飞行(xing)力学(xue),
2009����,27(4):39-42.
[2] 孟捷(jie)�,徐(xu)浩军(jun)�,李 大(da) 伟(wei).舵 机 带(dai) 宽 对(dui)Ⅱ型 PIO 预(yu)测(ce) 影(ying) 响(xiang)研(yan)究(jiu)[J].系(xi)统(tong)仿(fang)真(zhen)学(xue)报,2011���,23(4):813-816.
[3] 刘艳,高 正(zheng) 红,张(zhang) 星 雨.基(ji)于(yu)人机闭环(huan)稳定性(xing)的舵机(ji)速 率限(xian)制边界(jie)[J].航空工(gong)程进(jin)展(zhan)����,2018���,9(1):28-34.
[4] 习(xi)赵军(jun).基(ji)于虚拟仪器的(de)多(duo)路(lu)舵机(ji)测试系(xi)统(tong)[D].武汉(han):华中科(ke)技大学(xue),2007.
[5] 王文(wen)辉.基(ji)于虚(xu)拟仪(yi)器(qi)技术(shu)的舵(duo)机振动(dong)测试系统研制[D].长沙:国防(fang)科(ke)学技(ji)术(shu)大(da)学(xue),2013.
[6] 牛海(hai)发(fa),牛明博.一(yi)种(zhong)基于虚拟仪(yi)器(qi)的舵(duo)机测试系(xi)统 研制[J].实(shi)验技(ji)术与(yu)管理(li)��,2007,24(2):67-71.
[7] 谭(tan)营,许化(hua)龙(long),吴琳(lin).基(ji)于 LabVIEW 的舵(duo)机(ji)测(ce)试(shi)系(xi)统设 计(ji)[J].微计(ji)算(suan)机(ji)信息��,2007(31):133-134����,286.
[8] 苏(su)继杰����,鲍传(chuan)美�,郑幸(xing),等(deng).虚拟(ni)仪器(qi)的无人(ren)机(ji)舵(duo)机(ji)测(ce)试系统设(she)计与(yu)实(shi)现(xian)[J].火 力 与 指 挥(hui) 控(kong) 制(zhi)��,2008,33(S2):164-165,173.
[9] 崔(cui)伟(wei),赵(zhao)波(bo).便(bian)携(xie)式舵机测试系统的设计与(yu)应用[J]. 宇(yu)航(hang)计(ji)测(ce)技术,2010,30(3):57-61.
[10] 毛(mao)先柏,谢东(dong)�,李(li)昌(chang).基(ji)于支(zhi)持(chi)向(xiang)量机的(de)舵机(ji)带(dai)宽测 试(shi)[J].计(ji)算机(ji)测(ce)量(liang)与控(kong)制(zhi),2007(11:1482-1483�,1518.